Dettagli precisi:
Specifiche di FC
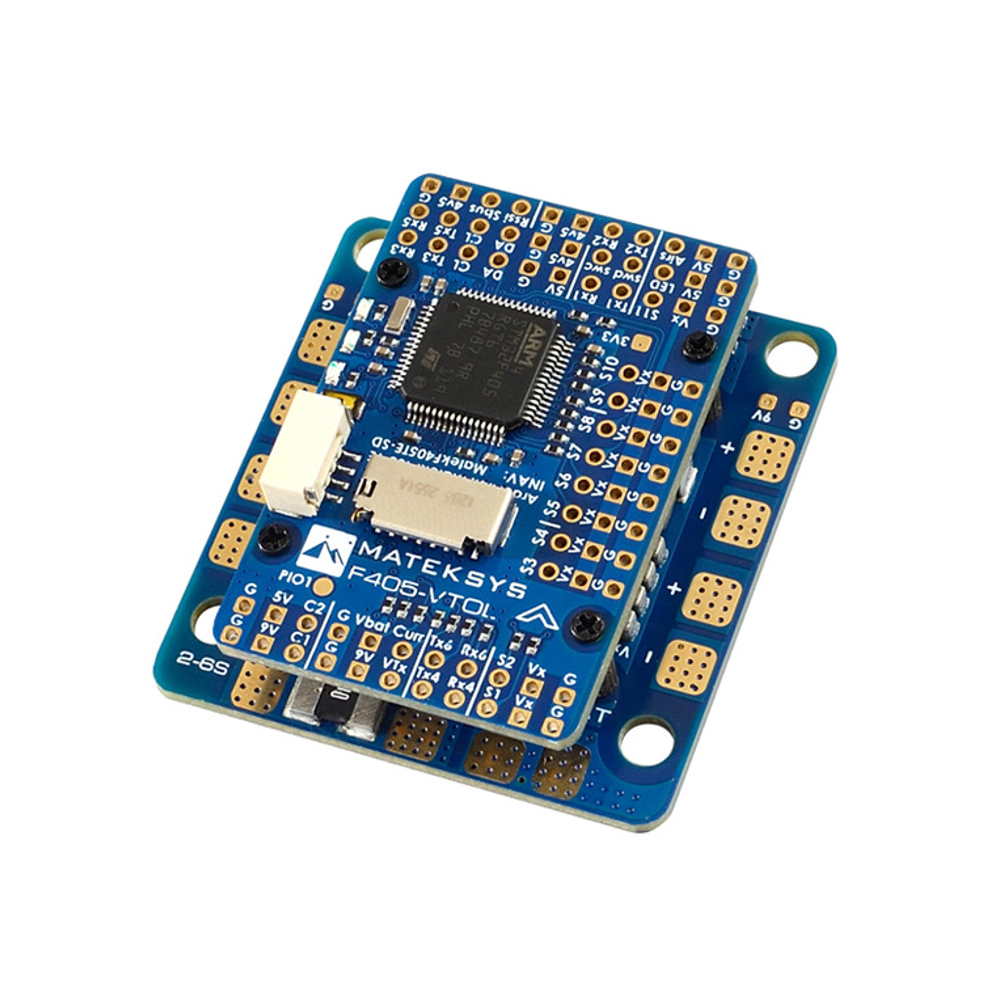
MCU: STM32F405RGT6, 168MHz, 1MB Flash
IMU: ICM42688-P
Baro: SPL06-001
OSD: AT7456E
Blackbox: slot per scheda MicroSD
6x UART, 1x opzione Softserial_Tx(INAV)
12x Uscite PWM
1x I2C
4x ADC (VBAT, Corrente, RSSI, Velocità dell'aria)
1x PINIO di ricambio
Estensore USB/Beep con Type-C(USB2.0)
Inverter integrato su UART2-RX per ingresso SBUS
Ingresso doppia telecamera selezionabile
FC Firmware
ArduPilot: MatekF405-TE
INAV: MATEKF405TE_SD (INAV 5.0 o successiva)
Firmware per Flight Controller Clicca qui
PDB
Intervallo di tensione di ingresso: 6.8-30V (2-6S LiPo)
Resistenza di senso: 100A continuo, 220A di picco
5x pad di alimentazione ESC, totale 100A continui
Supporta un carico continuo fino a 100A sulla piastra ESC vicino al resistore del sensore di corrente
Supporto per un carico continuo fino a 30A e picco di 50A su ciascun pad ESC del Quadcopter
Divisore di tensione della batteria 1K:20K (Scala 2100 in INAV, BATT_VOLT_MULT 21.0 in ArduPilot)
Sensore attuale: 220A, 3.3V ADC (Scala 150 in INAV, 66.7 A/V in ArduPilot)
Uscita BEC 5V
Progettato per il controllore di volo, ricevitore, OSD, fotocamera, segnalatore acustico, striscia LED 2812, modulo GPS, AirSpeed
Corrente continua: 2 Ampere
Uscita BEC 9V / 12V
Progettato per trasmettitore video, telecamera, gimbal ecc.
Corrente continua: 2 Ampere
Opzione 12V con ponticello
per ottenere un'uscita stabile di 9V/12V, la tensione di ingresso deve essere maggiore della tensione di uscita +1V
Uscita BEC Vx
Progettato per i servomotori
Tensione regolabile, 5V di default, 6V o 7,2V tramite jumper
Corrente continua: 8 Ampere, picco di 10A
per un'uscita Vx stabile, la tensione di ingresso deve essere maggiore della tensione Vx +1V
Uscita BEC 3.3V
Progettato per il modulo barometro/compasso e periferiche esterne a 3,3V
Regolatore lineare
Corrente continua: 200mA
Fisico
Montaggio: 25 x 25mm-Φ2mm, 35 x 35mm-Φ4mm
Dimensioni: 45 x 42 x 15 mm
Peso: 25g con adattatore USB/buzzer
Includendo
1x F405-VTOL
Estensore 1x USB (Tipo-C) / Buzzer passivo (beep) + cavo JST-SH-6P a JST-SH-6P da 20 cm per estensore USB.
Cavo 1x 20 cm JST-GH-4P a JST-GH-4P per porta I2C
1x condensatore Rubycon ZLH 35V 470uF
Pin Dupont 2.54 (La scheda viene spedita non saldata)
Layout

Cablaggio VTOL (ArduPlane)
Cablaggio normale dell'aeroplano (INAV)
Mappatura INAV
PINIO
PINIO1 /PIO1 pad, Livello basso predefinito, Livello basso/alto commutabile tramite la modalità USER1
PINIO2 è per il passaggio dell'ingresso della telecamera tramite le Modalità-USER2
Suggerimenti
F405-VTOL ha INAV pre-caricato per QC
Scarica INAV (Target MATEKF405TE_SD) fw 5.x o successivo direttamente da INAV configurator 5.x o successivo.
Mappatura di ArduPilot
Telemetria Frsky Smartport
segnale non invertito (violato) S.Port
qualsiasi Uart_TX di ricambio
SERIALx_BAUD 57
SERIALx_OPTIONS 7
SERIALx_PROTOCOL 4 o 10 (per yaapu)
DJI FPV OSD (ArduPilot 4.1)
https://ardupilot.org/plane/docs/common-msp-osd-overview.html
OSD_TYPE = 3
SERIALx_PROTOCOL = 33
MSP_OPTIONS = 0 (modalità di polling)
Relè (PINIO)
PINIO1, pad PIO1, livello basso di default
PINIO2, Interruttore fotocamera, C1 ACCESO DI DEFAULT
#
PA4 PINIO1 OUTPUT GPIO(81) BASSO //Pad PIO1
PB5 PINIO2 USCITA GPIO(82) BASSO //interruttore telecamera
# RCx_OPTION: Opzione di input RC
28 Relè On/Off
34 Relay2 Acceso/Disattivazione
35 Relay3 On/Off
36 Relè4 Acceso/Spento
per esempio
RELAY_PIN 81 //PIO1 GPIO
RC7_OPTION 28 //Relè On/Off, Utilizzare CH7 del trasmettitore per controllare il livello basso/alto di PIO1
RELAY_PIN2 82 //Interruttore telecamera GPIO
RC8_OPTION 34 //Relè2 On/Off, utilizzare CH8 del trasmettitore per controllare il livello alto/basso sulla piastra PB5
La funzione configurata sarà attivata quando il valore pwm dell'interruttore ausiliario supera 1800. Sarà disattivata quando il valore scende al di sotto di 1200.
Verificare il valore pwm inviato dal trasmettitore quando l'interruttore è alto e basso utilizzando lo schermo di calibrazione radio in Setup iniziale >> Hardware obbligatorio >> Mission Planner. Se non supera i 1800 o scende al di sotto dei 1200,è meglio regolare i punti finali del servomotore nel trasmettitore.
Suggerimenti
F405-VTOL ha INAV pre-caricato per QC
Il target MATEKF405TE_SD non è elencato in INAV Configurator 4.x.x, è supportato da INAV5.0 o successivi
ArduPilot fw, 'Errori interni 0x4000 l:213 spi_fail' avviso, per favore impostare LOG_BACKEND_TYPE = 1 (File) per la registrazione su scheda SD.