Dettagli precisi:
Suggerimenti
1. INAV, DSHOT non può funzionare su S3, S5, S7 a causa di un conflitto DMA, per favore utilizza ONESHOT o MULTISHOT e calibra il range PWM dell'ESC.
2. BetaFlight, impostare dshot_bitbang = ON quando si utilizza X6 e X8 DSHOT.
3. BetaFlight, il nome del target è stato rinominato come MatekF405TE_SD
4. ArduPilot, impostare LOG_BACKEND_TYPE = 1 (File) per la registrazione su scheda SD
Specifiche
MCU: STM32F405RGT6, 168MHz
IMU: ICM42688-P (SPI)
Baro: SPL06-001 (I2C)
OSD: AT7456E (SPI)
Blackbox: slot MicroSD (SPI)
6x UART, 1x opzione Softserial_Tx (INAV/BF)
11 uscite PWM (8 compatibili con Dshot per BF/ArduPilot)
1x I2C
4x ADC (VBAT, Corrente, RSSI, Velocità dell'aria)
1x PINIO di ricambio
4x pad individuali di alimentazione/segnale ESC
1x Gruppo di tamponi G/S1/S2/S3/S4 per segnale/massa ESC 4in1
Inverter integrato su UART2-RX per ingresso SBUS
Ingresso doppia telecamera selezionabile
Specifiche PDB
9 ~ 36V (3 ~ 8S LiPo)
PDB: 4x 35A (Max.4x 50A)
BEC: 5V 1.5A
BEC: 12V 2A
LDO 3.3V: 200mA
Sensore attuale: 220A, ADC 3.3V (scala INAV/BF 150, ArduPilot 66.7 A/V)
Divisore di tensione della batteria 1K:20K (scala INAV 2100, scala BF 210, moltiplicatore di tensione di ArduPilot BATT_VOLT_MULT 21.0)
Firmware
ArduPilot: MatekF405-TE
INAV: MATEKF405TE_SD
BetaFlight: MATEKF405TE_SD
Fisico
Montaggio: 30,5 x 30,5 mm, Φ4 mm con occhielli Φ3 mm
Dimensioni: 36 x 46 mm
Peso: 10g
Includendo
1x F405-TE
6x guarnizioni in silicone M4 a M3
1x Rubycon ZLH 35V/470uF (basso ESR)
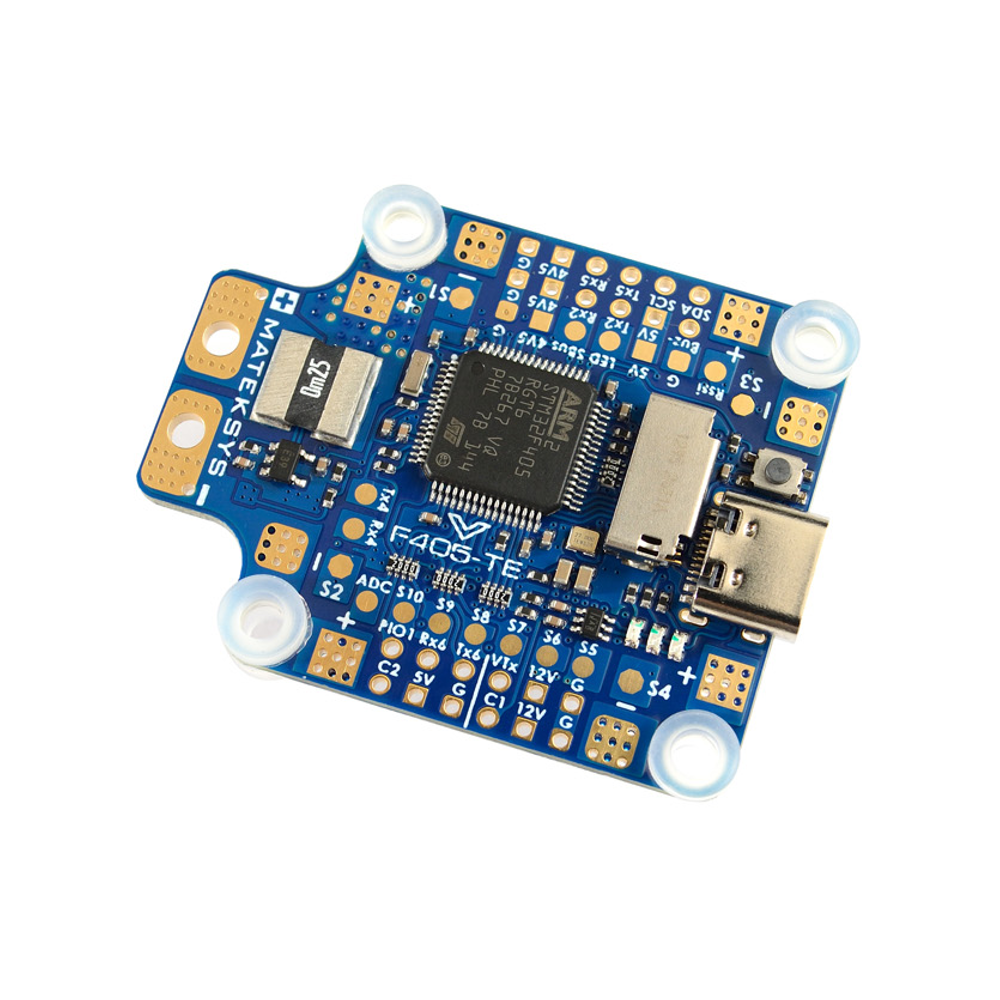
Layout e cablaggio

Mappatura INAV/BF
Mappatura di ArduPilot
Telemetria Frsky Smartport
segnale non invertito (violato) S.Port
qualsiasi Uart_TX di ricambio
SERIALx_BAUD 57
SERIALx_OPTIONS 7
SERIALx_PROTOCOL 4 o 10 (per yaapu)
DJI FPV OSD (ArduPilot 4.1)
https://ardupilot.org/plane/docs/common-msp-osd-overview.html
OSD_TYPE = 3
SERIAL4_PROTOCOL = 33
MSP_OPTIONS = 0 (modalità di polling)
Relè (PINIO)
PINIO1, pad PIO1, livello basso di default
PINIO2, Interruttore fotocamera, C1 ACCESO DI DEFAULT
#
PA4 PINIO1 OUTPUT GPIO(81) BASSO //Pad PIO1
PB5 PINIO2 USCITA GPIO(82) BASSO //interruttore telecamera
# RCx_OPTION: opzione di input RC
28 Relè On/Off
34 Relay2 Acceso/Disattivazione
35 Relay3 On/Off
36 Relè4 Acceso/Spento
per esempio
RELAY_PIN 81 //PIO1 GPIO
RC7_OPTION 28 //Relè On/Off, Utilizzare CH7 del trasmettitore per controllare il livello basso/alto di PIO1
RELAY_PIN2 82 //Interruttore telecamera GPIO
RC8_OPTION 34 //Relè2 On/Off, utilizzare CH8 del trasmettitore per controllare il livello alto/basso sulla piastra PB5
The configured feature will be triggered when the auxiliary switch’s pwm value becomes higher than 1800. It will be deactivated when the value falls below 1200.
Check the pwm value sent from the transmitter when the switch is high and low using the Mission Planner’s Initial Setup >> Mandatory Hardware >> Radio Calibration screen. If it does not climb higher than 1800 or lower than 1200, it is best to adjust the servo end points in the transmitter.
Suggerimenti
- F405-TE ha il firmware INAV preinstallato per il controllo di qualità
- impostare la frequenza PWM degli ESC BLHeli32 su 48KHz o superiore in BLHeliSuite
ArduPilot
Avviso errori interni 0x4000 l:213 spi_fail del firmware ArduPilot, si prega di impostare LOG_BACKEND_TYPE = 1 (File) per la registrazione su scheda SD. Scarica il firmware ArduPilot da QUI.
INAV
Con il firmware INAV, DSHOT non può funzionare su S3, S5, S7 a causa di un conflitto DMA. Si prega di utilizzare ONESHOT o MULTISHOT e calibrare la gamma PWM dell'ESC.
Scarica il firmware INAV 4.1.x dal sito web di Matck. INAV5.x o successivo direttamente dal configuratore INAV.
BetaFlight
Se si utilizza un buzzer passivo da 5V, digitare nella CLI «set beeper_frequency = 2500»
L'obiettivo MATEKF405TE_SD è stato supportato da BF4.4.
Imposta dshot_bitbang = ON quando si utilizza DSHOT X6 e X8,
È possibile scaricare BF 4.3 direttamente dal configuratore di BF, BF 4.2.x da Qui.
Il barometro SPL06-001 non è supportato da Betaflight.