Dettagli precisi:
Caratteristiche:
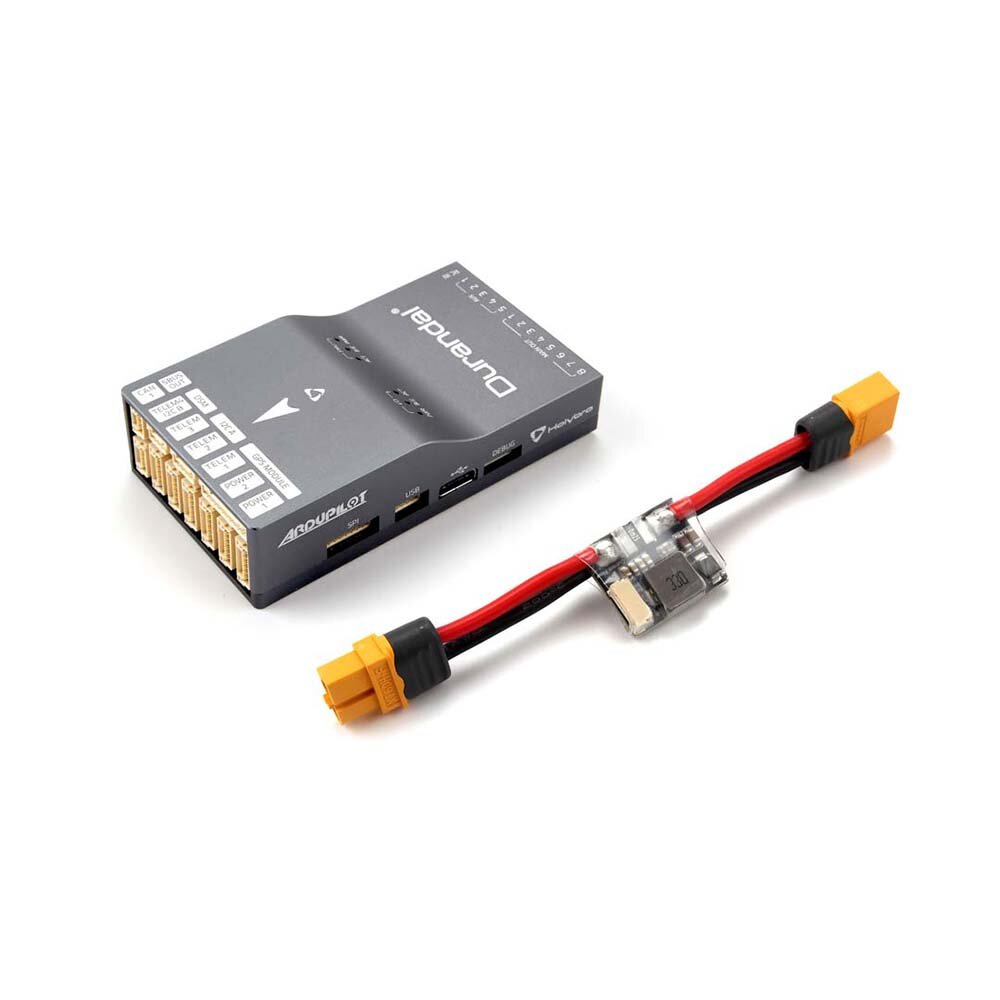
1. Durandal è un nuovo controller di volo progettato da Holybro che utilizza la serie di microcontrollori STM32H7. Man mano che il numero di aziende e sviluppatori di droni che necessitano di eseguire modelli più potenti e di costruire capacità di memoria incorporate aumenta, Durandal è progettato per offrire un'ulteriore potenza di calcolo per le esigenze di sviluppo. Il vantaggio sarà utile quando sono richieste funzionalità di calcolo intensivo.
Sfruttando la nostra vasta esperienza nella costruzione di piloti automatici negli anni passati, abbiamo implementato un nuovo sistema di assorbimento delle vibrazioni nel design meccanico dell'hardware e integrato un riscaldatore IMU per il controllo della temperatura dei sensori. Durandal è pre-installato con PX4 ed è supportato anche da altre piattaforme di volo come Ardupilot.
2.PM02 è un modo semplice per fornire al tuo APM e Pix32 alimentazione pulita da una batteria LiPo, così come misurazioni del consumo di corrente e della tensione della batteria, tutto tramite un cavo a 6 posizioni. Il regolatore di commutazione integrato fornisce in uscita 5,2 V e un massimo di 3 A da una batteria LiPo fino a 12S. Il modulo di alimentazione viene fornito completamente assemblato con connettori XT60, avvolto in un tubo termorestringente per la protezione.
Il modulo di alimentazione è progettato per alimentare APM, Pix32, un ricevitore RC e gli accessori per APM (GPS, radio). Non è progettato per alimentare i servi. Usa l'ESC/BEC del tuo aeromobile per questo. Il terminale GH è anche compatibile con Pix32, Pixhawk4, Pixhawk4 mini e Durandal.
Specifiche del controller di volo Durandal:
Processore principale FMU: STM32H743
Arm ® Cortex®-M7 a 32 bit, 480MHz, 2MB di memoria, 1MB di RAM
Processore IO: STM32F100
Arm ® Cortex®-M3 a 32 bit, 24 MHz, 8KB SRAM
Sensori integrati
Accel/Gyro: ICM-20689
Accel/Gyro: BMI088
Mag: IST8310
Barometro: MS5611
GPS: ricevitore GPS/GLONASS u-blox Neo-M8N; magnetometro integrato IST8310
mappatura della porta seriale:
SERIAL0 -> USB
SERIAL1 -> UART2 (Telem1)
SERIAL2 -> UART3 (Telem2)
SERIAL3 -> UART1 (GPS)
SERIAL4 -> UART4 (Telem4 I2CB)
SERIAL5 -> UART6 (Telem3)
SERIALE6 -> UART7 (di riserva, debug)
Dati Elettrici
Valutazioni di tensione:
Uscita modulo alimentazione: 4.9-5.5V
Tensione massima di ingresso: 6V
Sensore di corrente massimo: 120A
Ingresso alimentazione USB: 4.75~5.25V
Ingresso del binario del servocomando: 0-36V
Dati meccanici:
Dimensioni: 80*45*20,5 mm
Peso: 68.8g
Specifiche del modulo di alimentazione PM02 V3:
Tensione di ingresso UBEC: 7-51V (2-12s LiPo)
Corrente nominale: 60A
Corrente massima: 120A (<60S)
Sensore di corrente massimo: 120A
Supporta batteria 12S
Misurazione di tensione e corrente configurata per ADC da 3,3V
Il regolatore a commutazione produce 5.2V e un massimo di 3A
Peso: 20g
Fai in modo che il PM02 mostri la quantità di carica elettrica della tua batteria
Configurazione del pianificatore di missioni:
1. Collegare PM02 alla batteria, collegarlo anche a Mission Planner tramite USB.
2. Clicca su «IMPOSTAZIONI INIZIALI» e vai al menu «Monitor batteria».
3. Trasforma «Monito» in «Tensione e Corrente Analogica».
4. Trasforma "Sensore" in "9: Holybro Pixhawk4 PM".
Fai "HW Ver: "Il Cubo o Pixhawk" (pixhawk4, pixhawk4mini, pix32v5, pix32)",
«HW Ver: Lasciare vuoto (Durandal)»※
7.Inserire '18,182' nel divisore di tensione (calcolato).
Inserire "36.364" in "Ampere per volt".
9. Scollegare e ricollegare per completare l'installazione. («Tensione della batteria misurata» mostra la quantità attuale di carica elettrica della batteria.)
Pacchetto incluso:
1x Controller di Volo Durandal
1x Modulo di alimentazione PM02 V3