Dettagli precisi:
Caratteristiche:
1. Il controllo digitale dello sterzo è sensibile, con un'ampia corsa e una zona cieca zero. Non è una simulazione.
2. Controllo potenziometro, controllo remoto
3. Regolazione corrente e regolazione angolo
4. Commutazione in senso orario e antiorario, commutazione AD e PWM, impulso con larghezza di 1-2ms e 0,5-2,5ms
5. Perfettamente compatibile con sistemi di controllo remoto Futaba, JR, SANWA, Hitec e altri
Parametro:
Nome del prodotto: controllo dello sterzo
Tensione di lavoro: DC 12V~24V
Corrente di rotazione a vuoto: <500mA
Coppia massima:
180kg ⋅ cm (24V) (misurazione effettiva, non valore calcolato teoricamente)
1764N.cm(24V) (misurazione reale, non valore calcolato teoricamente)
90kg.cm(12V) (misurazione effettiva, non valore di calcolo teorico)
882N.cm(12V) (misurazione effettiva, non valore di calcolo teorico)
Velocità angolare:
0,5s/60° (sono necessari 0,5s per una rotazione di 60°), a 24V;
1,0s/60° (è richiesto 1,0s per una rotazione di 60°), a 12V;
Angolo di rotazione: 300° (MAX), (limite elettronico regolabile da 0 a 300°)
Modalità di ingresso: segnale a impulsi (telecomando, controllore del servomotore a più canali, microcontrollore) o segnale di tensione analogica (potenziometro)
Intervallo di ingresso del segnale di impulso: 0,5 ms-2,5 ms adatto a tutti i 'controllori del servo a canali multipli', 'telecomando aeromodelli da 1 ms a 2 ms', 'programmazione MCU', 'Arduin0', ecc. ;
Intervallo di ingresso del segnale di tensione: 0V a +5V
Precisione di controllo: 0.32°
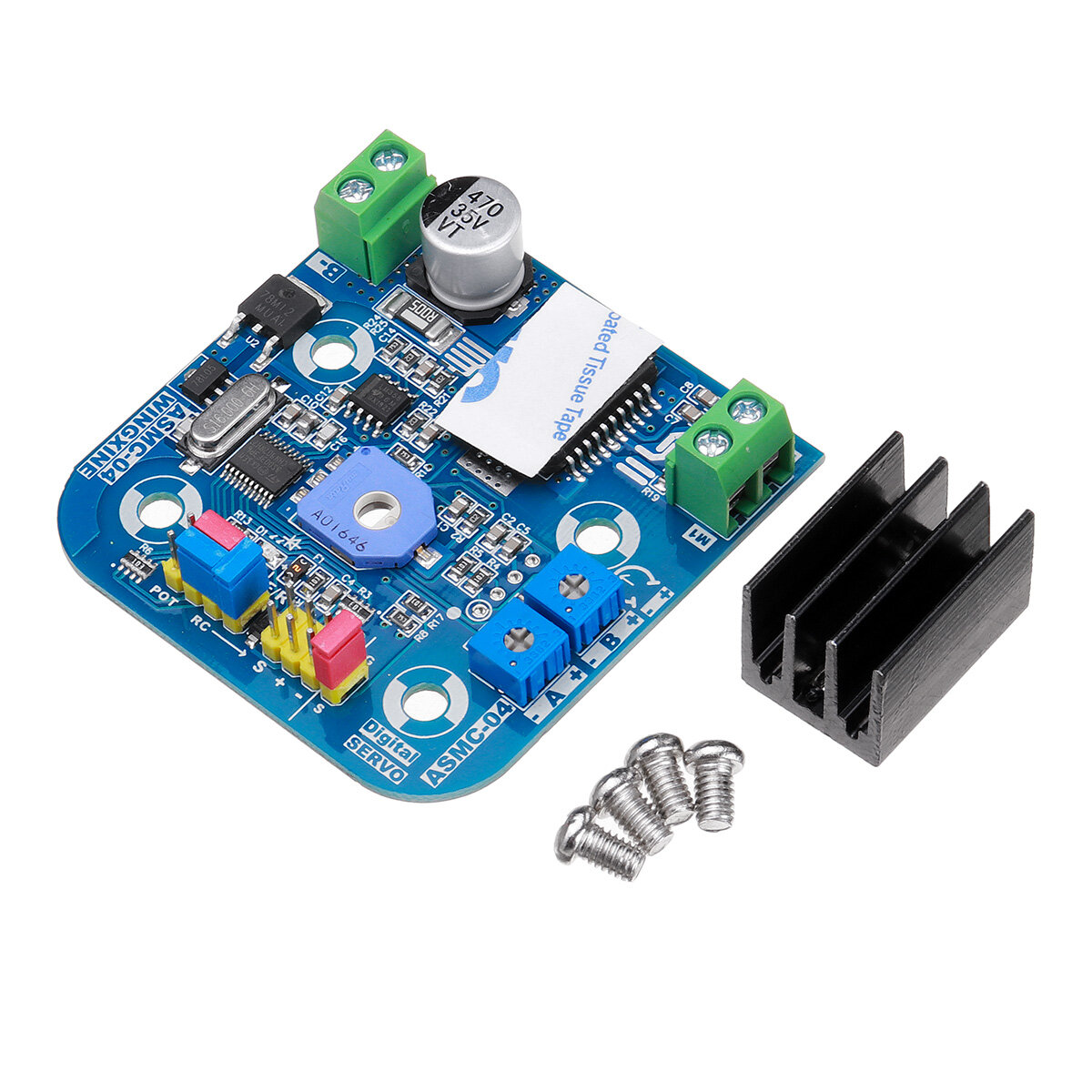
Colore: blu + nero
Materiale: PCB + metallo
Peso: 30g
Pacchetto incluso:
1 x Controllore servo
(Nota: il motore non è incluso)